Slowroads.io AutoPilot
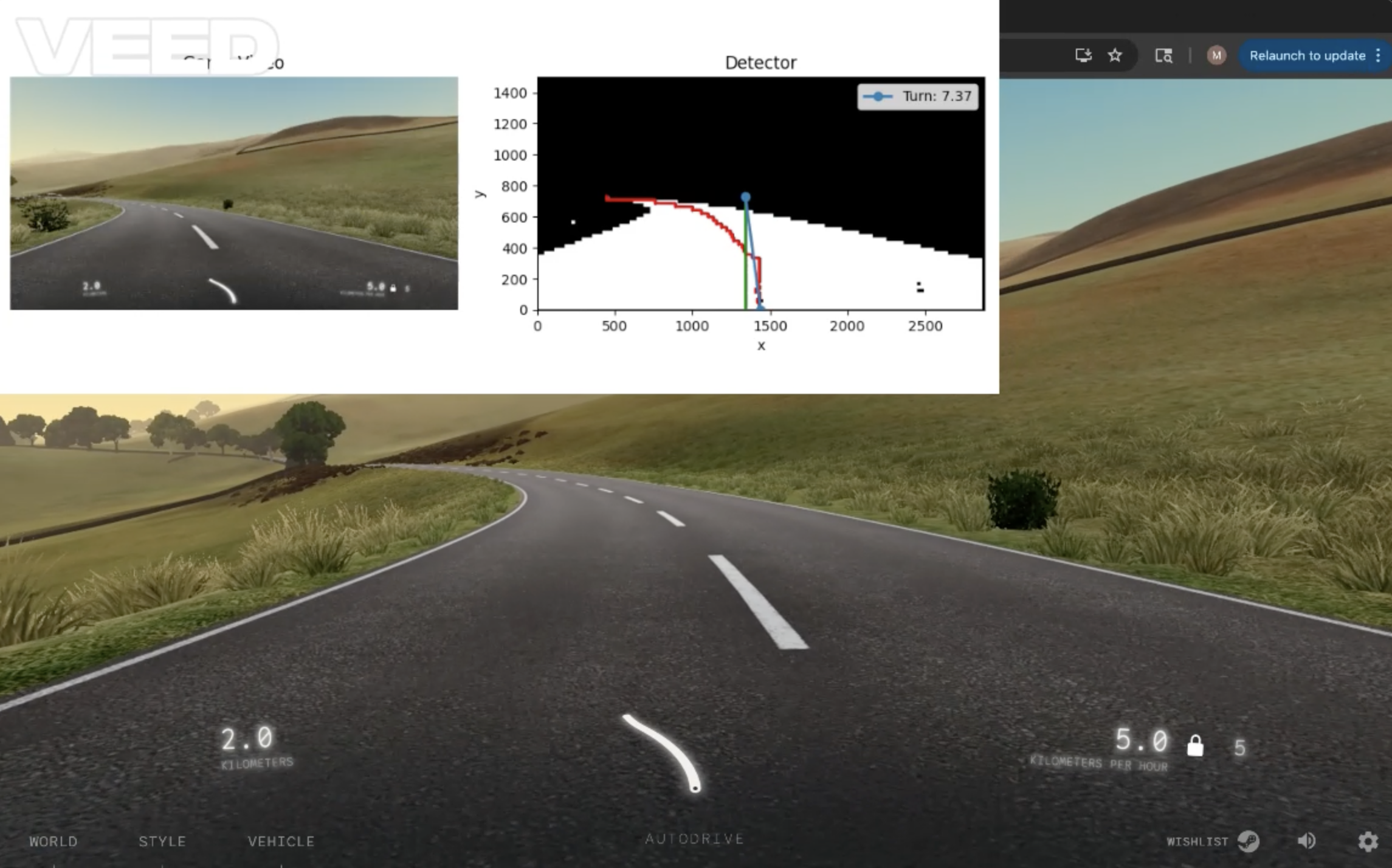
This project features an end-to-end autonomous driving system developed using the SlowRoads.io procedural simulator and a custom TensorFlow CNN. By capturing real-time visual data, the system processes raw frames into a simplified "Detector" mask to isolate lane boundaries and path geometry. This spatial information is fed into the CNN, which is trained to regress a continuous steering value; these predictions are then translated into simulated keyboard inputs to steer the vehicle. This integration of OpenCV and deep learning allows the model to generalize across winding, procedurally generated hills, effectively balancing high-speed stability with precise cornering without manual intervention.